|
Yeni
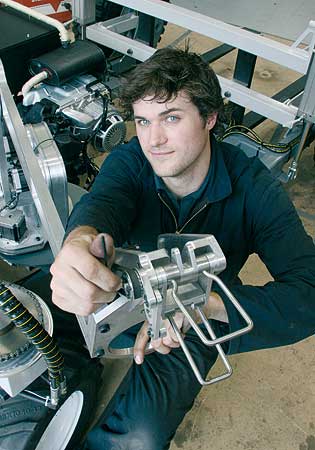
Zelanda, Massey Üniversitesi
Makine Mühendisliği Bölümünde görevli Dr. Rory
Flemmer (proje müdürü) ve
araştırma ekibi yeni Zelanda için önemli bir tarımsal gelir
kaynağı olan kivi
üretim alanlarında kullanılmak üzere yapay yolla
polenleme/tozlama’da
yapabilen ancak asıl amacı kivi hasadı olan uzaktan kumanda ile
yönlendirilen
bir endüstriyel tasarıma imza attı.
Yeni
Zelanda’da kivi üretim alanlarının tesis
edildiği coğrafi koşullarda kivi hasat robotunun çalışmasına
elverişli
olduğundan dolayı ilk prototipe ait hasat denemesi 2007–2008
aralığında başarı ile
gerçekleştirildiği
bildirildi.
Saatte 14.000 adet
kivi’yi hasarsız hasat edebilme
özelliğine sahip
olan bu tasarımda ana bölüm hasat kollarında bulunan infraruj
kamera sistemidir.
Bu sistem
içerisinde ki kameralar robotun
bahçe içerisinde yol almasını ve hasat edilecek meyveyi
kivi’yi diagnostik
olarak tanımlamasını sağlarken 360o hareket kabiliyetine
sahip
kollar penetrometrik ölçüm sonucu belirlenen meyve
sertliği derecesine göre
ayarlanarak meyveyi kendi ekseni etrafında döndürerek
koparmaktadır.
Kivi
hasat robotu ile ilgili çalışmalara, kivi
tarlalarındaki diğer bakım işlemlerini de uygulaya bilir duruma
getirilmesi
için devam edilmektedir.
|